
新闻资讯
陕西榆林架桥机厂家 架桥机步履走行主梁顶升高度管控
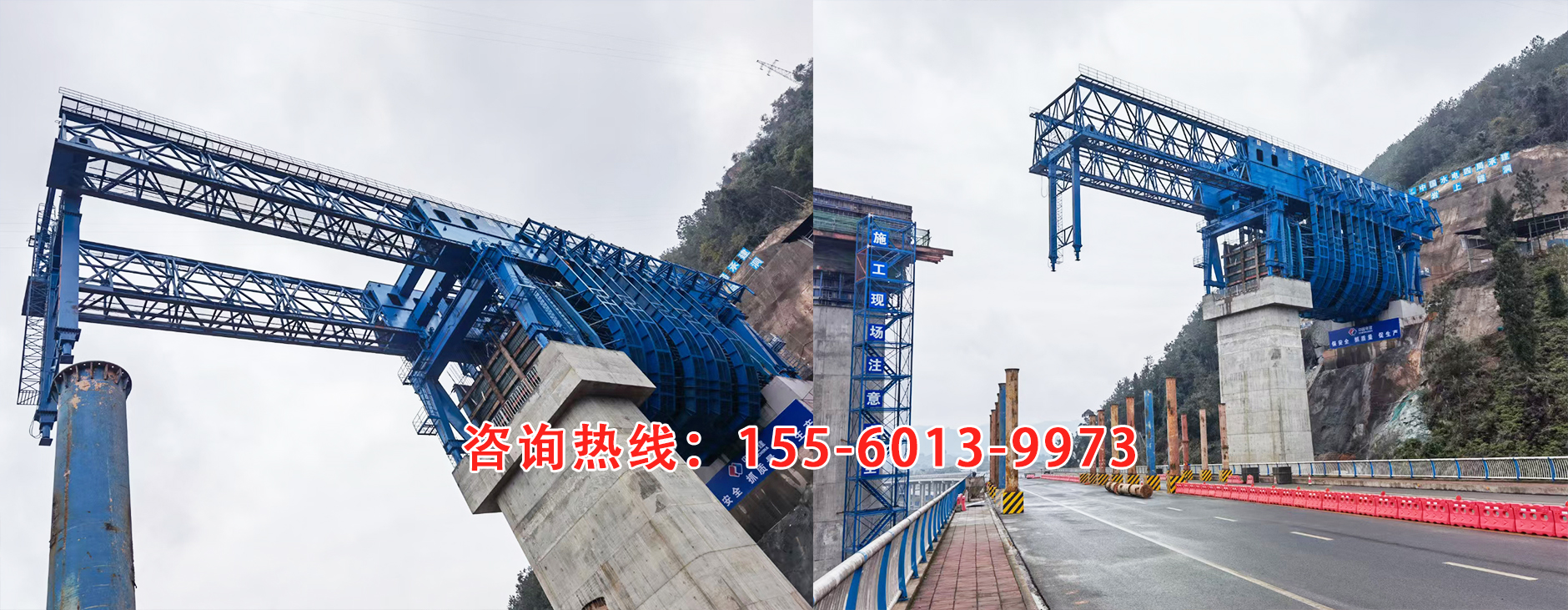
步履式走行是走行式架桥机无轨自主过孔的核心方式,依靠各组顶升油缸交替伸缩,完成主梁抬升、支腿前移、主梁回落的循环迈步动作,实现整机向前跨孔。在整套迈步流程里,顶升油缸抬起主梁的离地高度是极易被忽视却至关重要的参数,高度数值没有越高越好的说法,也不能间隙过小勉强迈步,精准把控合理离地高度,既能保证步履动作顺畅连贯,又能稳住整机重心,规避设备晃动与结构损伤风险。

常规桥面平整工况下,主梁有着固定的适宜离地高度,核心原则是刚好满足支腿无障碍前移即可。这个标准高度能够让主梁完全脱离支腿原有支撑面,彻底释放支腿竖向压力,让活动支腿不受主梁荷载束缚,平稳向前跨步移位,同时整机重心维持在低位区间,机身整体抗侧倾、抗风能力保持最佳状态。此时主梁桁架、顶升油缸、支腿结构全部贴合设计受力工况,交变荷载波动极小,设备各部件可以最小损耗完成步履循环动作。
如果顶升油缸过度抬升,主梁离地高度超标,整机运行稳定性会大幅下降。主梁抬升越高,整机整体重心向上偏移越明显,桥面轻微侧风、迈步带来的纵向惯性,都会放大机身左右、前后晃动幅度,整机平稳性大打折扣。同时油缸活塞杆伸出长度过大,油缸自身刚性会随之降低,迈步过程中产生的侧向微小作用力,容易造成活塞杆偏心受压,加快油缸内壁与密封件磨损,引发液压渗油故障。除此之外,主梁大幅度起落还会加大桁架杆件受力波动,节点板焊缝反复承受交变应力,增加结构疲劳开裂的隐患。
若是顶升高度不足,主梁离地间隙过小,同样会打乱步履走行节奏。间隙不够的情况下,前移的活动支腿很容易剐蹭桥面轨道、混凝土边角以及路面残留杂物,出现迈步卡顿、支腿硬顶桥面的情况,强行迈步还会造成支腿结构形变。而且主梁没有完全脱离支撑点位,机身荷载依旧部分压在支腿之上,步履迈步的受力逻辑被打乱,不仅失去了步履式走行无轨迈步的优势,还会额外磨损支腿底部承压结构,甚至拉扯主梁造成轨道微小偏移。
施工现场主要采用电控限位为主、人工微调为辅的方式管控顶升高度。设备液压系统内置行程限位程序,提前锁定油缸安全顶升行程,从程序层面杜绝盲目超高顶升;常规标准化过孔作业,设备可自动匹配最优离地高度,无需操作人员手动调节。遇到桥面凹凸不平、大风天气两类特殊工况,再进行小幅人工干预:桥面起伏时略微抬高间隙,避免支腿蹭碰桥面;大风天气主动降低顶升高度,压低整机重心,提升防风能力。同时全程保证左右侧油缸同步顶升,杜绝主梁左右高度偏差,防止机身单侧倾斜。
总的来说,步履走行主梁顶升高度控制,核心就是不过度抬升、不间隙不足。以顺畅迈步为基础,以重心稳定为底线,依靠自动化限位减少人为操作误差,特殊工况灵活微调。合理的离地高度控制,让架桥机步履迈步动作连贯柔和,减少整机冲击与结构疲劳,保障整机过孔作业安全高效开展。
